龙门模组常见的四种控制方式
时间:2023-06-08来源:佚名
|
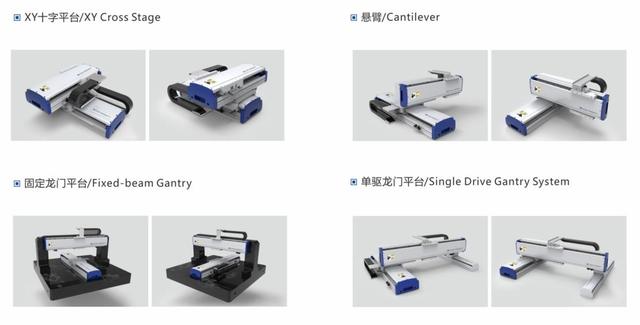
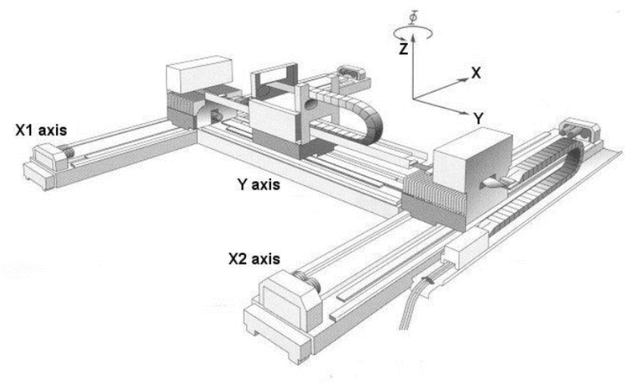
作为多轴精密平台的一种,龙门平台可拓展多种场景,适用于多种对高精度有追求的行业。高工致力于设计生产用于制造、检测和测试的直驱电机、平台和精密系统方案,通过有效利用龙门平台,拓展更多场景落地,解决用户的多元化需求。 在晶圆检测、激光微加工、3D测量、数字打印等领域,对平面运动要求会比较高:像大跨度、大负载、运动平滑,轴间耦合小等。因此对运动控制一般都要求能快速响应和整定、误差小、精度高。 在这些场合,传统的十字架式的XY平台的很难满足要求,因此必须使用龙门结构,如图所示,一个龙门需要由两个电机和机械结构组成,X1和X2共同完成X轴方向的运动。
常见的龙门控制方式 1、单反馈—单电机:只在其中一边有电机提供动力,另一边则由导轨支撑,通过机械应力来运动。 2、单反馈—多电机:相当于两个电机并联,一组信号同时控制两个电机。 3、主从控制:通过控制器来协同两个驱动器同步运动。 4、交叉解耦算法:在驱动器层面进行龙门的交叉解耦控制,进行龙门双轴电机、耦合后反馈的自动控制,有龙门轴控制刚性的独立PLD参数。 龙门算法是交叉解耦算法中的一种,把龙门看作是多输入多输出系统,前进方向轴和扭摆轴两个控制对象来控制而不是两个电机,这样可以实现耦合后两轴单独控制,减少机械耦合的影响。 |