电机制造业:采用一种霍尔传感器控制无刷直流电机
|
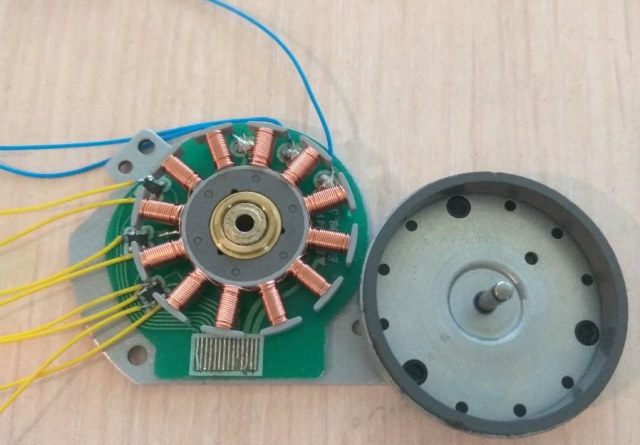
无刷直流电机(BLDC),也称为电子换向电机或同步直流电机,直流电通过逆变器或开关电源后,它产生一个交流电流来驱动带有闭环控制器的电机,控制器通过改变绕组的相位和电流来控制电机的转速和转矩的。无刷电机比有刷电机的优点是高功率重量比,高速度和电子控制。无刷直流电机的结构和运行与交流感应电动机和有刷直流电动机非常相似马达,无刷直流电机也由转子和定子组成。
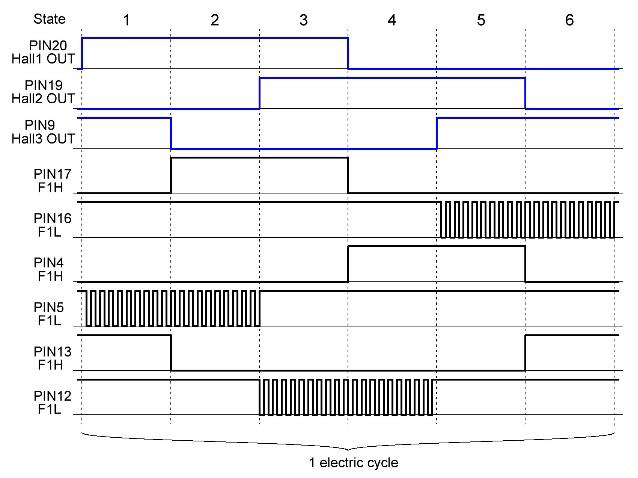
控制规则 无刷直流电动机定子由叠层钢制成,叠层钢用来承载绕组,绕组定子可以按两种模式排列-星型模式(Y)或三角形模式(Δ)。在这两种模式之间主要区别,Y模式在低转速下提供高扭矩,而Δ模式提供低转速时扭矩低。这是因为在Δ配置中,一半的电压施加在不受驱动的绕组,从而增加损耗,进而提高效率和转矩。无刷直流电动机使用电循环控制。一个电循环有6种状态,基于霍尔传感器的电机交换序列如下图所示。
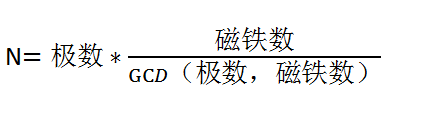
无刷直流电机的基本工作原理与有刷直流电机相同,在有刷直流电机的情况下,使用机械换向器和电刷实现反馈,在无刷直流电动机中,反馈是通过多个反馈传感器来实现的,最常用的传感器有霍尔传感器和光学编码器。在三相无刷直流电动机中,极数是3的倍数,磁铁的数量是2的倍数。由于每个电机的磁铁和极数不同,因此,电机每转一圈步数也不同,步数(N)可以采用下面的公式计算,本文使用的电机有12个极和16个磁铁,转一圈,需要产生48个电步。
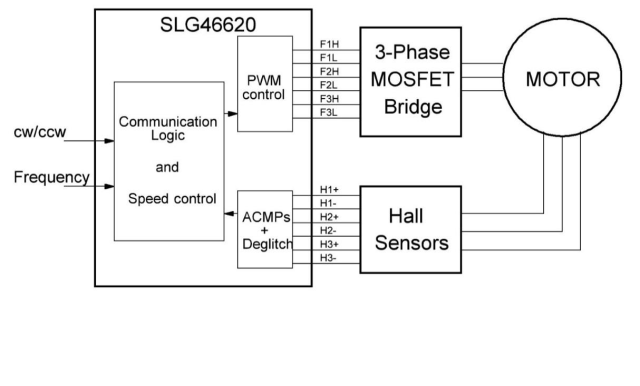
设计策略 这种设计通过两个输入信号来控制马达的速度和方向,引脚8控制方向,高电平插脚8表示电机顺时针旋转,低电平表示逆时针方向,引脚2用于通过输入频率控制速度。如果此引脚上没有频率的信号将关闭驱动器,电机将停止。在开始的500毫秒内,频率作用于此pin电机将启动,使用一个输入频率,我们可以准确地控制马达的速度。
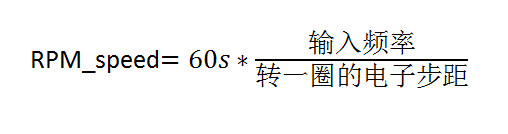
要计算转速,我们需要知道一个电机包含多少个电气步矩。
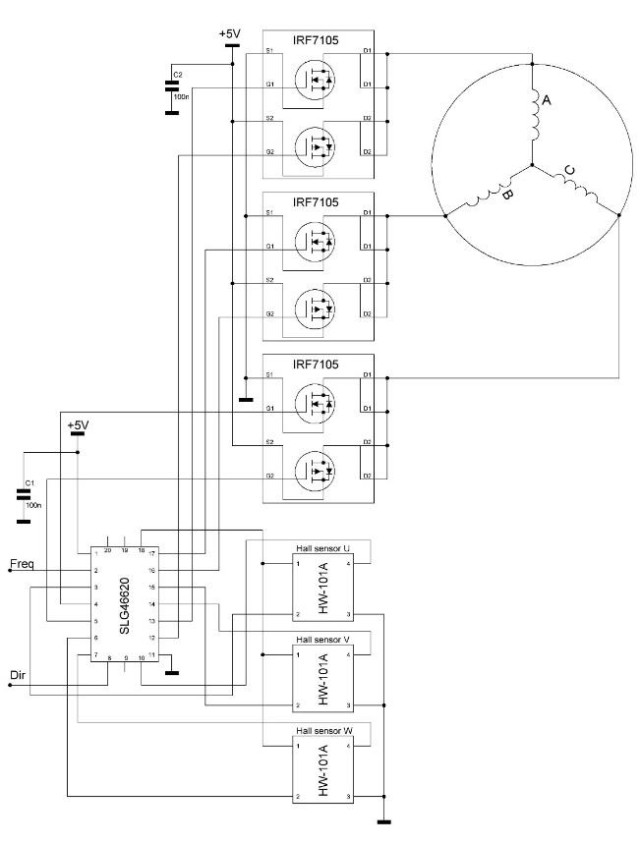
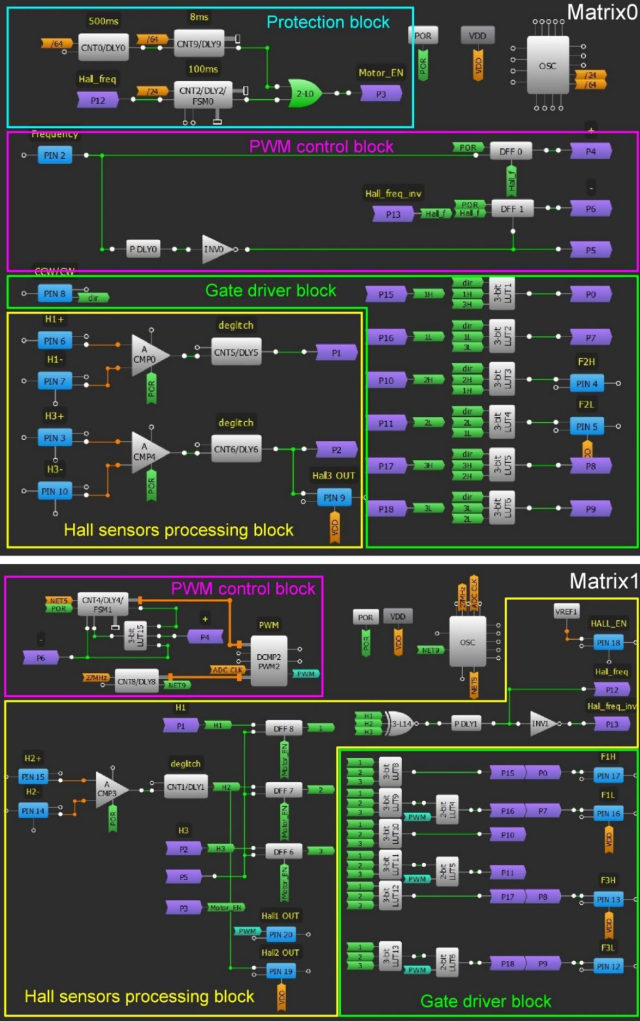
霍尔传感器介绍 霍尔传感器的处理模块包括ACMPS(ACMP0、ACMP3、ACMP4)和除噪滤波器(dly1、dly5、dly6)和dffs(dff6、dff7、dff8)。这个项目中使用的霍尔传感器有4个引脚;VDD、GND和2个差分输出,连接到ACMPS的输入端和输入端,内部VREF组件设置为1.2 V,用作霍尔传感器的VDD,过滤信号来自ACMPS进入dffs的D输入,输入频率对这些DFF进行计时并设置旋转速度。
此应用中的电机有48步,因此在5kHz的频率下,电机将以6250的速度运行转速。控制电路分为四个部分:霍尔传感器处理块,一个门驱动器块,一个pwm控制或速度控制块,和一个保护块。
霍尔传感器工作过程 栅极驱动器块包括12个3位LUT,这些lut根据霍尔传感器的反馈,6个LUT(3位LUT8–3位LUT13)用于顺时针方向另一个6(3位LUT1–3位LUT6)用于切换到CCW方向。 PWM控制包括PWM2组件、计数器CNT8、有限状态机FSM1、3位LUT15、2个dffs(dff0和dff1)、上升沿检测器pdly0和逆变器inv0,DFF0和DFF1一起作为频率比较器工作。
保护块包括2个延迟(dly2和dly9)、计数器cnt0和配置的2位lut0作为异或门,这部分设计用于保护电机和外部FET不被烧毁。如果电机卡住或无法启动,霍尔传感器将无法提供必要的反馈关掉马达。 结论 如何使用SLG46620控制三相无刷直流电动机,Greenpak CMIC和霍尔效应传感器,SLG46620还包含其他功能,例如,Greenpak中的ADC可以解释输入直流电压并根据该值生成一个pwm脉冲,而不是使用输入频率。 |