如何为高速应用设计多相电机?
|
随着全球对电动汽车 (EV) 和可持续交通的需求不断增长,多相驱动 (MPD) 作为电源转换系统的首选之一,越来越受到工业界和学术界的关注。首次引入多相驱动,专用于五相感应电机。六相感应电机在中作为多相驱动发展的另一个里程碑进行了研究,在它们的起源中,多相电机主要用于发电。但如今,它们似乎更适合大功率应用。此外,功率半导体器件的发展和转换器调制技术的进步激发了越来越多关于多相驱动主题的研究。多相驱动吸引了研究人员将它们用于工业和牵引应用,其中容错能力是一个关键的设计特征,例如电动汽车、船舶推进和航空航天。
多相电机是具有多于三相的定子绕组和转子磁体的电机,它们具有更高的功率密度、更低的转矩脉动、更好的容错能力以及比传统三相电机更简单的控制等优势。然而,为高速应用设计多相电机可能具有挑战性,因为它涉及不同参数和约束之间的权衡。 电机的种类 第一步是选择适合应用的多相电机类型。多相电机主要有两种类型:同步电机和感应电机。同步电机在转子上有永磁体或电磁铁,而感应电机有短路笼或绕线转子。同步电机具有更高的效率、功率因数和扭矩重量比,但它们需要更复杂和昂贵的转换器和控制器。感应电机成本较低、控制更简单、热稳定性更好,但效率、功率因数和扭矩重量比较低。
相数 第二步是确定多相电机的最佳相数,相数会影响机器及其转换器的性能、成本和复杂性。通常,增加相数可降低转矩脉动、电流和电压的谐波含量以及滤波器组件的尺寸。然而,它也增加了定子绕组、开关、传感器和电线的数量,从而增加了系统的成本、重量和损耗。一个常见的经验法则是选择相数为三的倍数,例如六、九或十二,以实现平衡运行。
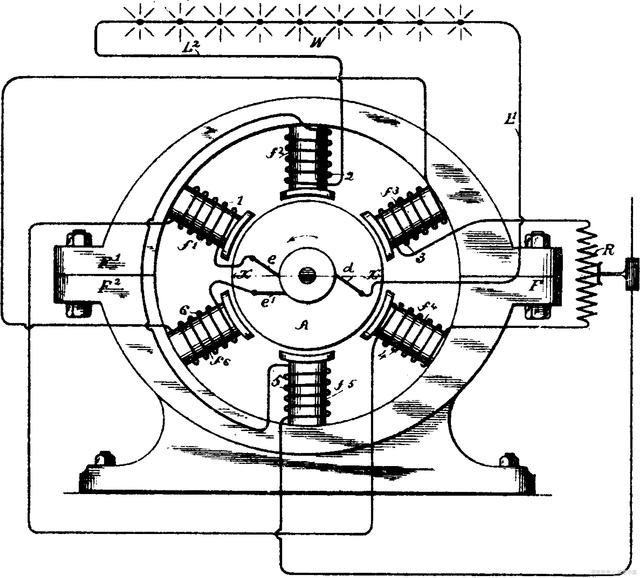
多相驱动器与传统驱动器相比具有许多突出优点,三相驱动器包括较少的每相电流或电压,多相电机中的定子励磁会产生改进的磁动势 (MMF),从而降低空间谐波、降低转矩脉动和提高效率。 绕组配置 第三步是为多相电机设计绕组配置,绕组配置决定了定子绕组的分布、方向和连接。它会影响生成的电压、转矩的产生、磁链和机器的绕组因数。有不同类型的绕组配置,例如单层、双层、分数槽、集中式和分布式。每种类型在绕组系数、谐波含量、绕组电阻和互耦合方面都有其自身的优点和缺点。您应该选择能够最大化绕组因数、最小化谐波含量并满足您应用的电压和电流要求的绕组配置。
转子设计 第四步是的多相电机设计转子,转子设计取决于您选择的多相电机类型。对于同步电机,需要选择转子磁铁的类型、形状和尺寸,以及磁极对数。转子磁铁会影响气隙磁通密度、反电动势、齿槽转矩和机器的退磁风险。您应该选择提供高磁通密度、低齿槽转矩和高退磁温度的转子磁铁。对于感应电机,您需要设计转子条或绕组,以及端环。转子条或绕组会影响转差率、转子电阻、启动转矩和机器的速度控制。您应该选择转差率低、转子电阻高、启动转矩高和速度范围宽的转子条或绕组。 冷却系统 第五步是为多相电机设计冷却系统,冷却系统对于将机器温度保持在安全范围内至关重要,特别是对于产生高损耗和热量的高速应用。冷却系统可分为风冷和液冷两种。风冷使用风扇或鼓风机使空气在机器周围循环,而液冷则使用泵或管道使水或油在机器周围循环。风冷更简单、更便宜、更可靠,但冷却能力较低,噪音较高。液冷更高效、更紧凑、更安静,但成本、复杂性和泄漏风险更高。 转换器和控制器 最后一步是为多相电机设计转换器和控制器,转换器是将输入电源(如直流电或交流电)转换为机器输出电能(如变频变幅交流电)的装置。控制器是根据机器所需的速度和扭矩调节转换器输出功率的装置。转换器和控制器应与相数、电压和电流额定值以及多相电机的控制策略兼容。有不同类型的转换器和控制器,例如电压源转换器(VSC)、电流源转换器(CSC)、脉冲宽度调制(PWM)、矢量控制(VC)、直接转矩控制(DTC)和无传感器控制(SC) )。每种类型在效率、电能质量、动态响应和鲁棒性方面都有自己的优点和缺点,应该选择满足您的性能、成本和可靠性标准的转换器和控制器。 |