三相异步电动机的机械特性,看这一篇就够了
|
本篇文章主要要让读者理解掌握以下内容: 知道三相异步电动机的机械特性,并能够用其指导电力拖动系统的设计; 三相异步电动机具有结构简单、运行可靠、价格低、维护方便等一系列优点,尤其是随着电力电子技术的发展和交流调速技术的日益成熟,使其在调速性能方面完全可与直流电动机相媲美,因此被广泛应用在电力拖动系统中。
三相异步电动机 1 三相异步电动机的机械特性机械特性的表达式 机械特性是指电动机的转速n与电磁转矩Tem 之间的关系,即以n=f(Tem )或s=f(Tem )的形式表示。电磁转矩有三种表达式,即物理表达式、参数表达式和实用表达式。 (1)物理表达式
物理表达式虽然反映了异步电动机电磁转矩产生的物理本质,但并没有直接反映出电磁转矩与电动机参数之间的关系,更没有明显地表示电磁转矩与转速之间的关系。因此,分析或计算异步电动机的机械特性时,一般不采用物理表达式,而是采用下面介绍的参数表达式。 (2)参数表达式 异步电动机电磁转矩的参数表达式为
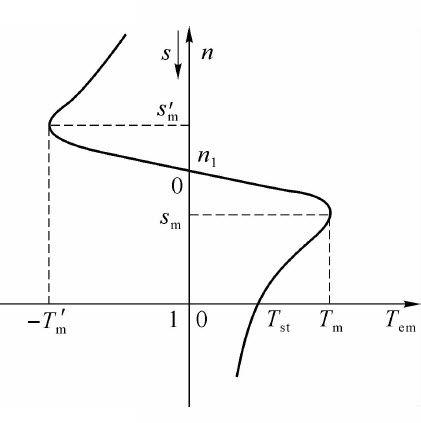
式中,m1 为定子相数;p为磁极对数;U1 为定子相电压;f1 为电源频率;r1 和x1 为定子每相绕组的电阻和漏抗; r'2和 x'2为折算到定子侧的转子电阻和漏抗。上述参数都是不随转差率s变化的常量。当电动机的转差率s(或转速n)变化时,可由式(5.2)算出相应的电磁转矩Tem ,因而可以作出机械特性曲线如图5.1所示。
图5.1 三相异步电动机的机械特性 机械特性分析 在第一象限:0<n<n1 ,0<s<1,n、Tem 均为正,电机处于电动运行状态; 在第二象限:n>n1 ,s<0,n为正,Tem 为负,电机处于发电机运行状态; 在第四象限:n<0,s>1,n为负,Tem 为正,电机处于电磁制动状态。 临界转差率和最大转矩 在机械特性曲线上,转矩有两个最大值,一个出现在电动状态,另一个出现在发电状态。最大转矩Tm 和对应的转差率sm (称为临界转差率)分别为
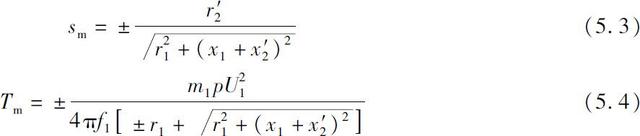
式中,“+”号对应电动状态;“-”号对应发电状态。 通常r1 <<(x1 x'2 ),故式(5.3)、式(5.4)可近似为
分析sm 、Tm 表达式可得出结论 Tm 正比于U21 ,说明Tm 对电压波动非常敏感; sm 与 r'2成正比,Tm 与 r'2无关; sm 、Tm 均与(x1 x'2)成反比。 最大电磁转矩Tm 对电动机来说具有重要意义。电动机运行时,若负载转矩突然增大,且大于最大电磁转矩,则电动机将因为承载不了而停转。为了保证电动机不会因短时过载而停转,一般电动机都应具有一定的过载能力。显然,最大电磁转矩愈大,电动机短时过载能力愈强,因此把最大电磁转矩与额定转矩之比称为电动机的过载能力,用过载系数λT 表示,即
注:一般电机取λT =1.6~2.2,起重机、冶金电机取λT =2.2~2.8。 启动转矩 在图5.1所示的机械特性曲线中还反映了电动机另外一个非常重要的技术参数,就是电动机的启动转矩Tst 。启动转矩是电动机接通电源瞬间(n=0)时的电磁转矩,它标志着电动机的启动能力,只有在启动转矩大于负载转矩的情况下电动机才能启动。n=0时s=1,将s=1代入式(5.2)可得启动转矩表达式 分析Tst 表达式可得结论 Tst 正比于 ; Tst 与(x1 )成反比; 在一定范围内,Tst 正比于r'2 ,故绕线电机可采用转子串电阻启动的方法以增大Tst 。 启动转矩Tst 与额定转矩TN 之比称为启动转矩倍数,用kst 表示,即
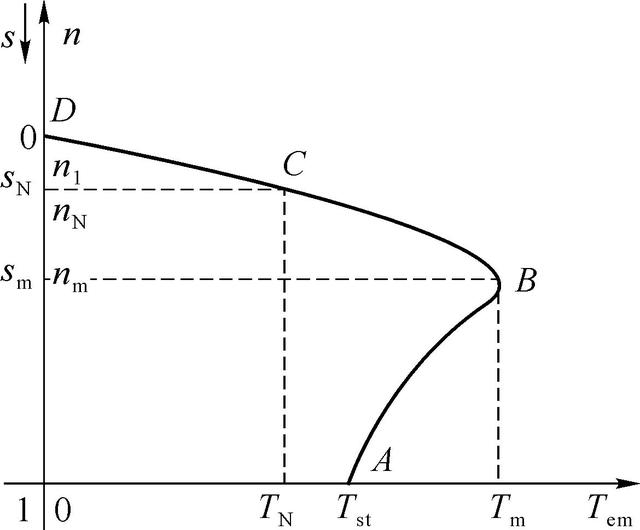
kst 是表达电动机性能的一个重要参数,它反映了电动机启动能力的大小。一般电动机取1.0~2.0,起重机、冶金电机取2.8~4.0。 (3)实用表达式 机械特性的参数表达式清楚地表示了转矩和转差率与电动机参数之间的关系,用它分析各种参数对机械特性的影响是很方便的。但是,针对电力拖动系统中的具体电动机而言,其参数是未知的,欲求其机械特性,使用参数表达式显然是困难的。因此希望能够利用电动机的技术数据和铭牌数据求得电动机的机械特性,即机械特性的实用表达式。 在忽略r1 的条件下,用电磁转矩公式(5.2)除以最大转矩公式(5.6),并考虑到临界转差率公式(5.5),化简后可得电动机机械特性的实用表达式 2 三相异步电动机的固有机械特性三相异步电动机的固有机械特性就是电动机在额定电压和额定频率下,按规定的接线方式接线,定子和转子电路不外接电阻或电抗时的机械特性。当电机处于电动机运行状态时,其固有机械特性如图5.2所示,现对固有机械特性进行分析。
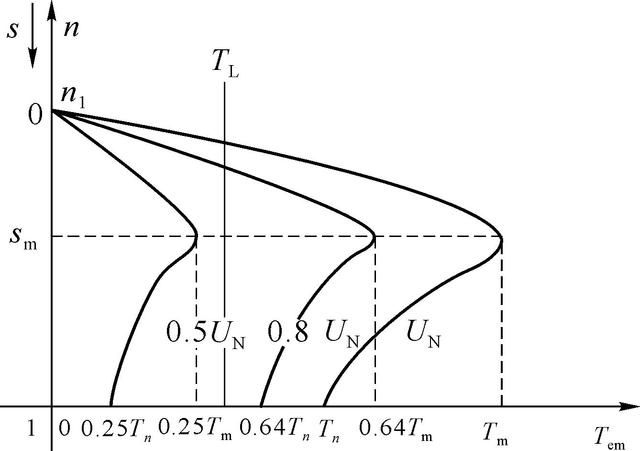
图5.2 三相异步电动机的固有特性 (1)启动点A 开始启动瞬间,n=0,s=1,Tem =Tst ,I1 =Ist =(4~7)IN 。 (2)最大转矩点B B点是机械特性曲线中的线性段(D→B)与非线性段(B→A)的分界点,此时:s=sm ,Tem =Tm 。B点也是电动机能否稳定运行的临界点,临界转差率sm 也是由此而得名。 (3)额定运行点C 额定运行时转差率很小,一般s=0.01~0.06,所以电动机的额定转速略小于同步转速,这也说明了固有特性的线性段为硬特性。 (4)同步转速点D D点是电动机的理想空载点即同步转速点,此时Tem =0。如果没有外界转矩的作用,异步电动机本身不可能达到同步转速点。 3 三相异步电动机的人为机械特性三相异步电动机的人为机械特性是指人为地改变电源参数或电动机参数而得到的机械特性。可以改变的电源参数有电压U1 和频率f1 ;可以改变的电动机参数有磁极对数p、定子电路参数r1 和x1 ,以及转子电路参数 r'2和x'2 等。所以,三相异步电动机的人为特性种类很多,这里介绍常见的几种人为特性。 (1)降低定子电压时的人为特性 当定子电压U1 降低时,Tem 、Tm 、Tst 与电压 成正比减小,sm 和nl 与Ul 无关而保持不变,所以可得U1 下降后的人为机械特性如图5.3所示。
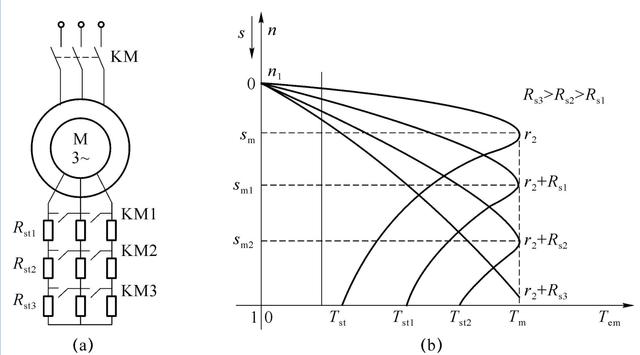
图5.3 三相异步电动机降压时的人为特性 降低定子电压可减小电动机启动时的启动电流,但是在降低定子电压时,Tem 、Tm 、Tst 与电压 成正比减小,造成电动机启动时间延长,过载能力下降,如果Tst <TL ,还会造成电动机不能启动。 如果电动机在额定负载下运行,U1 降低后将导致转速n下降,转差率s增大,转子电流将因转子电动势增大而增大,从而引起定子电流增大,导致电动机过载。长期欠压过载运行,必然使电动机过热,电动机的使用寿命缩短。另外电压下降过多,可能出现最大转矩小于负载转矩,这时电动机将停转。 (2)转子电路串接对称电阻时的人为机械特性 在绕线转子异步电动机的转子三相电路中,可以串接三相对称电阻Rst ,如图5.4(a)所示。由前面的分析可知,此时n1 、Tm 不变,而sm 则随外接电阻的增大而增大。其人为机械特性如图5.4(b)所示。
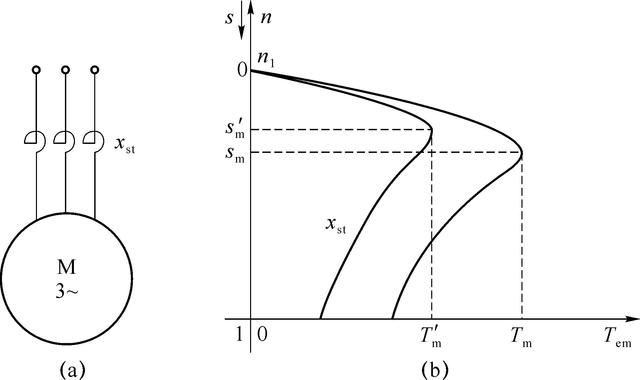
图5.4 绕线转子异步电动机转子串接对称电阻 (a)转子串三相对称电阻接线图(b)转子串三相对称电阻机械特性 由图5.4(b)可见,在一定范围内增加转子电阻,可以增大电动机的启动转矩。当所串接的电阻(如图5.4(b)中的RS3 )使其sm =1时,对应的启动转矩将达到最大转矩,如果再增大转子电阻,启动转矩反而会减小。另外,转子串接对称电阻后,其机械特性曲线线性段的斜率增大,机械特性变软。 转子电路串接对称电阻不仅适用于绕线转子异步电动机的启动,还可以对异步电动机进行制动和调速,这些内容将在以后几节中讨论。 (3)定子电路串接对称电抗(或电阻)时的人为特性 在笼型异步电动机的定子三相绕组串接三相对称电抗器xst ,如图5.5(a)所示。定子三相绕组串接三相对称电抗器后实际上与定子三相绕组实现了串联分压,降低了定子绕组的电压,其人为特性与降压启动的人为特性相似,其不同之处在于电抗器中的电抗和电阻分别与定子绕组的电抗x1 、电阻r1 相串联,由式(5.3)可知,临界转差率sm 减小。根据前面的分析可知,此时n1 不变,Tm 、Tst 均随xst 的增大而减小,其人为机械特性如图5.5(b)所示。
图5.5 异步电动机定子串接对称电抗器 (a)电路图;(b)机械特性 定子电路串接对称电抗一般用于笼型异步电动机的降压启动,以限制电动机的启动电流。定子电路串接三相对称电阻时的电路图和人为特性与串接电抗时相似。串接电阻的目的同样是为了限制启动电流,但由于电阻上要产生能量损耗,一般不宜采用。 |