单片机,微处理器,DSP,FPGA,PC总线等运动控制器
时间:2023-06-27 | 来源:佚名
|
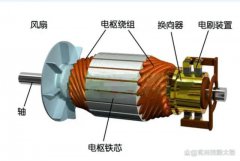
运动控制(Motion Control)通常是指在复杂条件下将预定的控制方案、规划指令转变成期望的机械运动,实现机械运动精确的位置控制、速度控制和转矩控制。运动控制系统一般由控制器、功率放大器与驱动装置、电动机、负载及相关的传感器等构成。控制器下达指令,通过驱动器转化为能够控制电动机运行的电信号,驱动电动机旋转,带动工作机械运行,同时电动机和工作机械上的传感器将电动机及机械上的实时信息反馈给控制器,以便控制器实时加以调整,从而控制整个系统的稳定运行。运动控制器是指以中央逻辑控制单元为核心、以传感器为检测元件、以电动机或动力装置和执行单元为控制对象的一种控制装置。运动控制起源于早期的伺服控制。简单地说,运动控制就是对工作机械的位置、速度等进行实时的控制,使其按照设定的运动轨迹和参数进行运动。早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术而发展起来的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无须另外的处理器和操作系统支持,可以独立完成运动控制功能和人机交互功能。这类控制器主要用于专门的数控机械和其他自动化设备,根据应用行业的工艺要求设计了相关的功能,用户只需按要求编写应用加工代码文件,将指令文件传输到控制器,控制器即可完成相关的动作。这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅取决于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统。这就是专用的运动控制器。专用的运动控制器因为其局限性和价格昂贵使其应用受到限制。
通用型运动控制器 随着制造业突飞猛进的发展,在纺织,包装、机床、医疗器械、工程机械等行业对运动控制系统有了极大的需求,所以通用型的运动控制器有了长足的发展。通用型运动控制器在性能上也能够达到高速和高精度。通用型运动控制器充分利用DSP(数字信号处理器)的计算能力,能够进行复杂的运动规划,高速实时多轴插补,误差补偿和更复杂的运动学和动力学计算,使得运动控制精度更高,速度更快,运动更加(píng)稳。 通用型运动控制器的分类 目前,通用型运动控制器主要有以单片机或微处理器作为核心处理器、以专用芯片作为核心处理器、基于PC总线的以DSP和FPGA(现场可编程门阵列)作为核心处理器3种形式。 1. 以单片机或微处理器
作为核心处理器这类运动控制器定位运动速度较慢,精度不高,成本相对较低。在一些只需要低速点位运动控制和轨迹要求不高的轮廓运动控制场合应用。
2. 以专用芯片作为核心处理器 这类运动控制器只能输出脉冲信号,工作于开环控制方式。这类控制器对单轴的点位控制是基本满足要求的,但不适合于多轴插补运动和高速轨迹插补控制的工作机械。这类控制器不能提供连续插补功能,也没有前瞻功能,特别不适合于有大量的小线段连续运动的场合(如模具加工),由于硬件资源的限制,这类控制器的圆弧插补算法通常采用逐点比较法,这样圆弧插补的精度不高。 3. 基于PC总线的以DSP和FPGA作为核心处理器 这类控制器是基于PC总线的以DSP和FPGA作为核心处理器的开放式运动控制器,这类运动控制器以DSP芯片作为运动控制器的核心处理器,以PC作为信息处理(píng)台,运动控制器以插卡形式嵌入PC,即“PC 运动控制器”的模式。这样将PC的信息处理能力和开放式的特点与运动控制器的运动轨迹控制能力有机结合在一起,具有信息处理能力强、开放程度高、运动轨迹控制准确、通用性好的特点。这类控制器充分利用了DSP的高速数据处理能力和FPGA的超强逻辑处理能力。这类运动控制器通常具有多轴协调运动控制和复杂的运动轨迹规划、实时插补运算、误差补偿、伺服滤波算法,能够实现闭环控制。
声明:本文转载自网络,不代表本平台立场,仅供读者参考,著作权属归原创者所有。我们分享此文出于传播更多资讯之目的。如有侵权,请联系我们进行删除,谢谢!
|