破碎系统模糊控制
时间:2023-07-14来源:佚名
|
破碎机自动控制系统的控制目标是实现破碎机工作负荷稳定,即控制电机的功率恒定。而影响破碎机电机功率的主要因素是破碎机的给矿量和排矿口。通常为了保证破碎产品的粒度,排矿口一般为设定值,调整范围不大。因此,系统主要通过控制破碎机的给矿量来控制电机在恒定功率状态下工作。破碎系统滞后时间长,矿石性质多变,采用常规的给矿量恒定控制和PID控制效果并不是太理想,尤其是在某些矿种中还存在矿石理化性质多变的现象,这就对破碎系统提出了更高的要求,在本节中主要介绍模糊控制理论对破碎机功耗的控制。 破碎系统恒功率模糊控制结构如图3-1所示。通过功率变送器检测电机功率,将功率信号送至模糊控制器,将检测的功率值与设定的功率值进行比较,根据其差值及差值变化率,通过设计的模糊规则,推理得到一控制量,由该控制量控制变频器,改变给矿电机的转速,即调节给矿量,从而调整破碎机的电机功率,实现对破碎机恒功率的控制。
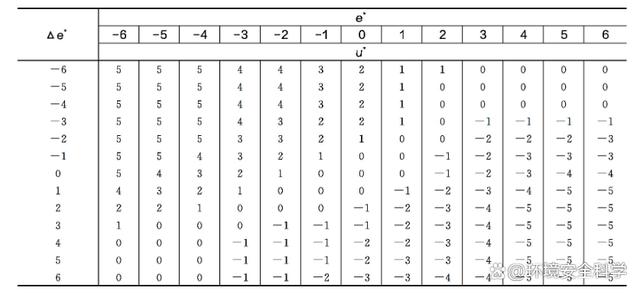
进行模糊运算,首先需要将实际偏差和偏差变化率通过各自的量化因子转换为模糊论域。偏差e的语言变量为E,偏差变化率ec的语言变量为EC,输出控制量u的语言变量为U,其相应的模糊子集分别为{-6,-5,-4,-3,-2,-1,0, 1, 2, 3, 4, 5, 6}、{-6,-5,-4,-3,-2,-1,0, 1, 2 , 3, 4 , 5, 6}和{-5,-4,-3,-2,-1,0, 1, 2, 3, 4, 5}。把精确值离散化,并将其由基本论域变换到模糊论域之后,分别形成其隶属函数或模糊变量赋值表。根据现场生产经验,设计模糊控制规则如图3-2所示。通过查询将当前时刻模糊控制器的输入量(偏差及偏差的变化量)所对应的控制输出值,采用最大隶属度法解模糊化后作为模糊控制器的最终输出。
|